Robot Dog with a Robotic Arm: Combining Agility and Precision
Authors: Jipeng Kong, Zihui Yu
Date: November 2024
What’s the Big Idea?
Imagine a robot dog that can not only run and jump like a real dog but also use its "paws" to pick up objects or open doors. This project aims to create just that—a robot dog that can stand upright and use a robotic arm mounted on its front legs to perform tasks that require both agility and precision.
How Does It Work?
The robot dog is built with four legs for mobility, allowing it to walk, run, and even jump over obstacles. To make it stand upright, a special 3D-printed foot support was designed to keep it stable. Once upright, the robot can use its front legs to operate a lightweight robotic arm. This arm has multiple joints and can be equipped with different tools, like grippers, to perform tasks like picking up objects.

Figure 1: The robotic arm mounted on the robot dog.
What Makes It Special?
What sets this robot apart is its ability to switch seamlessly between moving around and performing precise tasks. For example, it can walk across uneven terrain and then stop to pick up an object with its arm. This combination of mobility and dexterity makes it ideal for applications like search and rescue, where a robot might need to navigate difficult environments and interact with objects.

Figure 2: The 3D-printed foot support for stability.
What’s Next?
While the robot dog can already stand upright and perform basic tasks, there’s still room for improvement. For example, the team is working on making its movements smoother and more efficient. Future updates will focus on refining the robot’s control system to make it even more reliable in real-world scenarios.
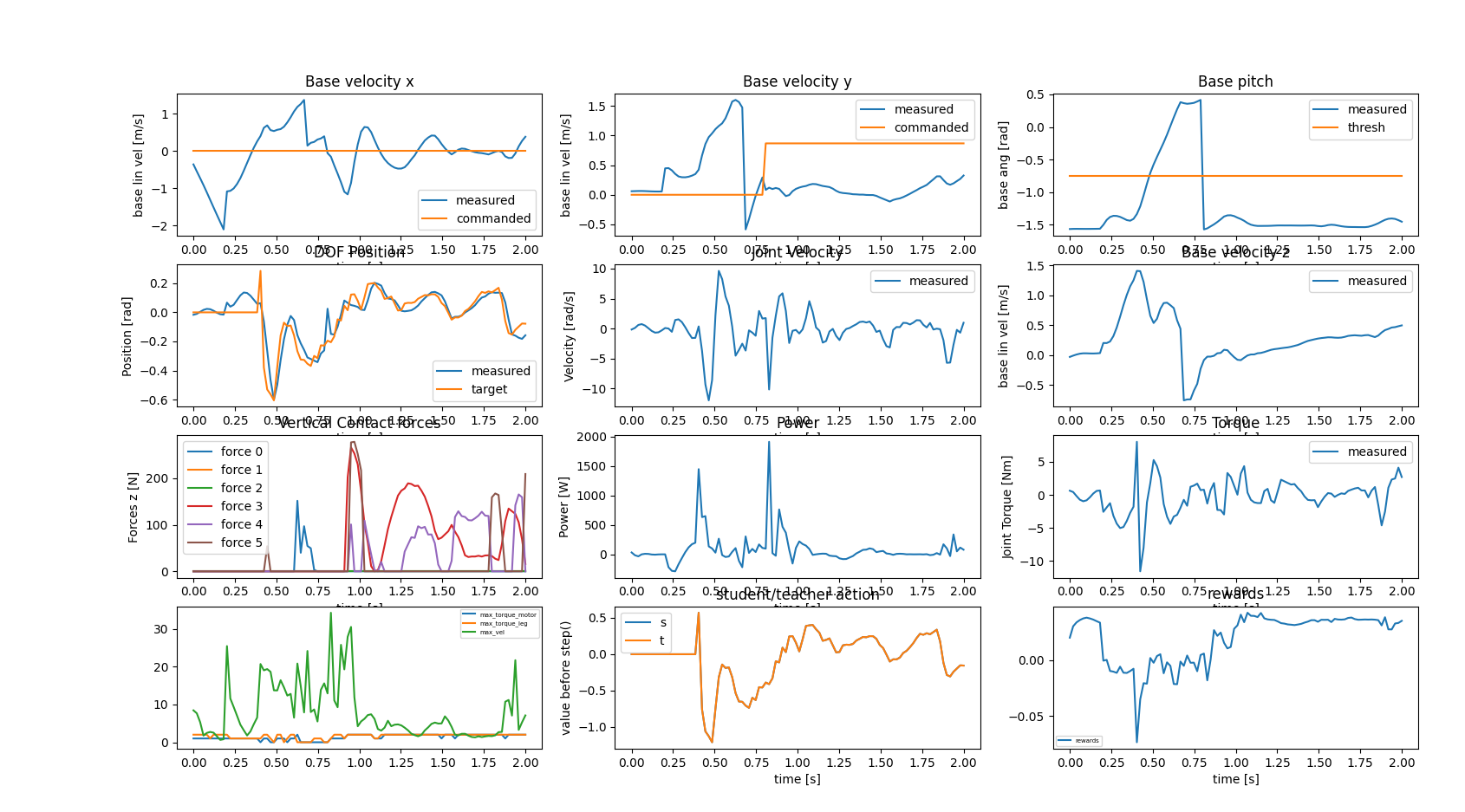
Figure 3: Training results showing the robot’s performance.