Mapping Robot: Car Data Collection
Project Overview
This project provides solutions to enable a mapping robot to collect data efficiently and comprehensively across the ShanghaiTech University campus and underground garage. The primary challenge is the robot's limited speed (1 meter per second), which restricts its ability to map extensive areas effectively.
To address this, we propose innovative solutions to enhance operational efficiency. By integrating the mapping robot with an electric flatbed car, we aim to significantly increase its mobility and coverage capability. Our goal is to create a versatile mapping system capable of collecting detailed datasets of the entire campus, overcoming the limitations of the current mapping robot. This approach leverages the mobility of small vehicles to improve the robot's speed and efficiency.
The Solution
We ultimately selected an Electric Flatbed Car, specifically a hydraulic lifting model, to transport the robot. This integration addresses the challenges of limited speed and coverage, allowing for rapid and comprehensive data collection.
Visuals
Working Integration
Here's the mapping robot integrated with the electric flatbed car:

Figure: Working car
Frame Design Exploded View
An exploded view of the custom frame designed to mount the robot:
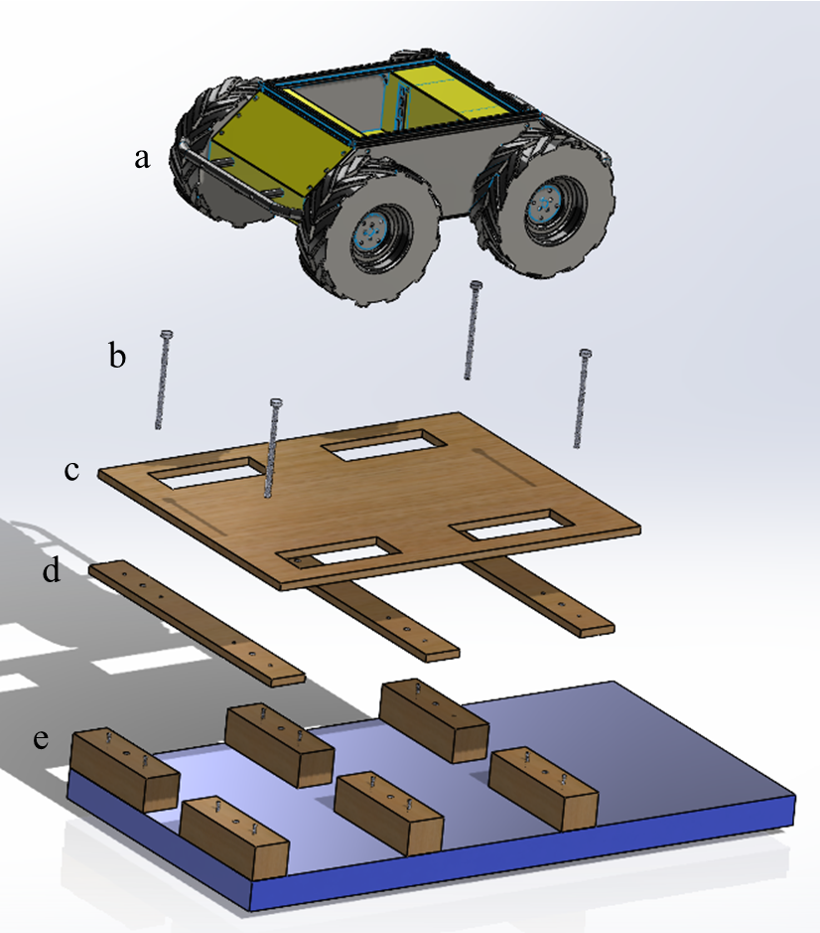
Figure: Exploded vision. a) UGV. b) Long bolts. c) wood plate. d) wooden strips. e) wooden beam.
Mapping in Action (Video)
See the system collecting data:
Video: Mapping car collecting data.