Autonomous Object Grasping with Fetch Robot

The Fetch Robot used in our project
In the world of robotics, the Fetch robot is a versatile tool. Our project utilized the Fetch robot to demonstrate object recognition and manipulation.
Project Overview
The Fetch robot, developed by Fetch Robotics, features an RGBD camera that captures color and depth images. These images allow the robot to understand its environment in three dimensions.
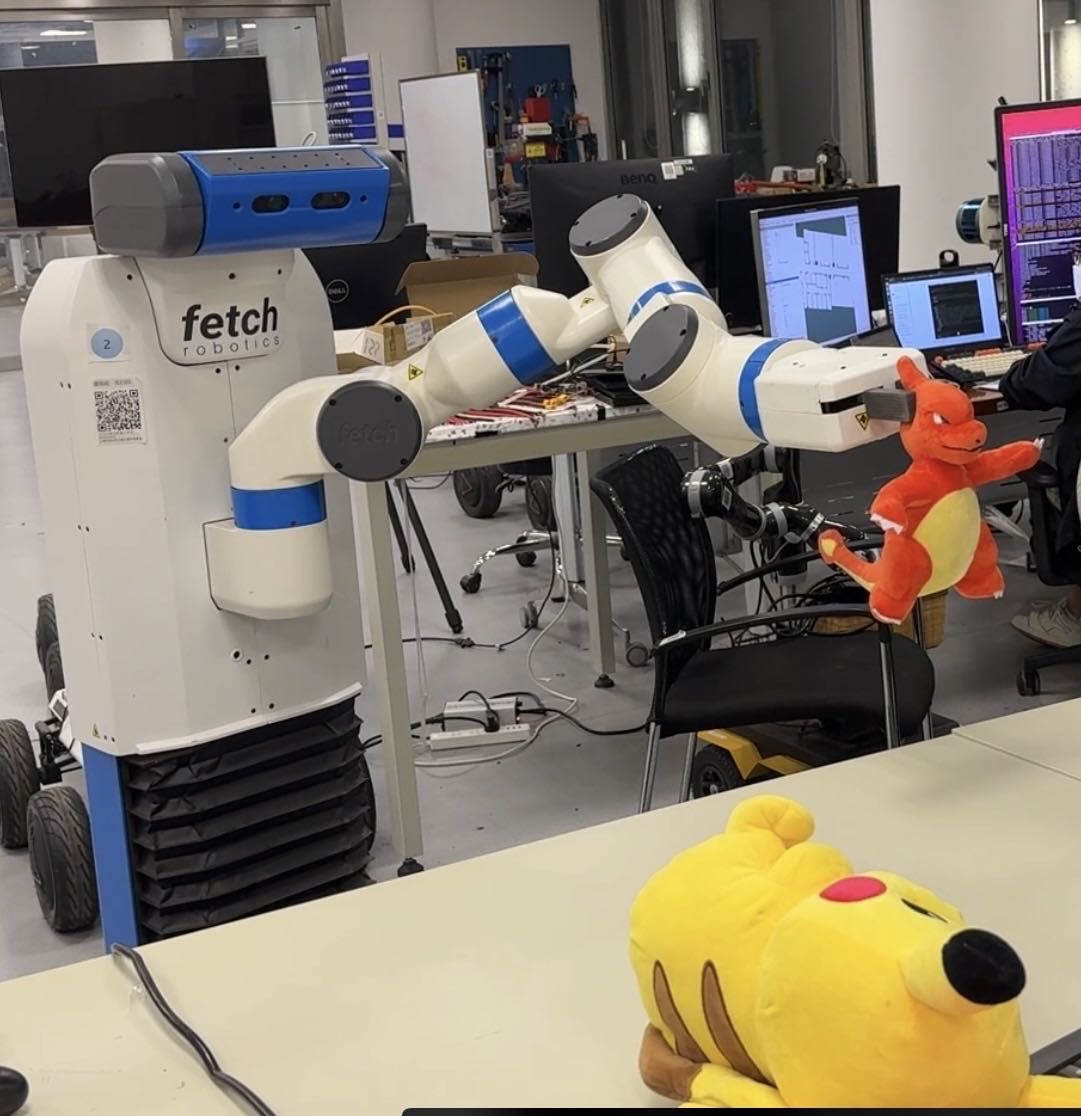
Fetch Robot performing object grasping
The Process
- Image Capture: The robot's camera captured both RGB and depth images.
- Image Processing: These images were sent to a powerful computer via SSH. The computer used AnyGrasp software to analyze the images and generate potential grasp poses.
- Pose Evaluation: AnyGrasp evaluated the poses to determine the best ones.
- Pose Transformation: Using the TF tool from ROS, we transformed these poses into a format the Fetch robot could understand.
- Motion Planning: MoveIt was used to plan the robot's movements, ensuring collision avoidance. The robot then moved its gripper to the object, grasped it, and lifted it.
Video demonstration of the complete grasping process
This project demonstrated the advanced capabilities of the Fetch robot and modern robotics software. By combining these technologies, we successfully programmed the robot to interact with its environment, showcasing the future potential of robotics in everyday tasks.