Industrial Robot Navigation System
This project is about using an elevation map in navigation system of a large-scale industrial robot. This robot works in an unstructured outdoor environment where the ground is not flat and there may exist some natural obstacles. In our system, we take everything on the ground as a part of the ground to construct a new ground surface. Then we use elevation map to represent the ground surface. The elevation map is a 2D map which divides the ground into 2D cells. In each cell, it records the height of each cell corresponding to each region of the ground. By doing so, we could easily analyse the traversability.
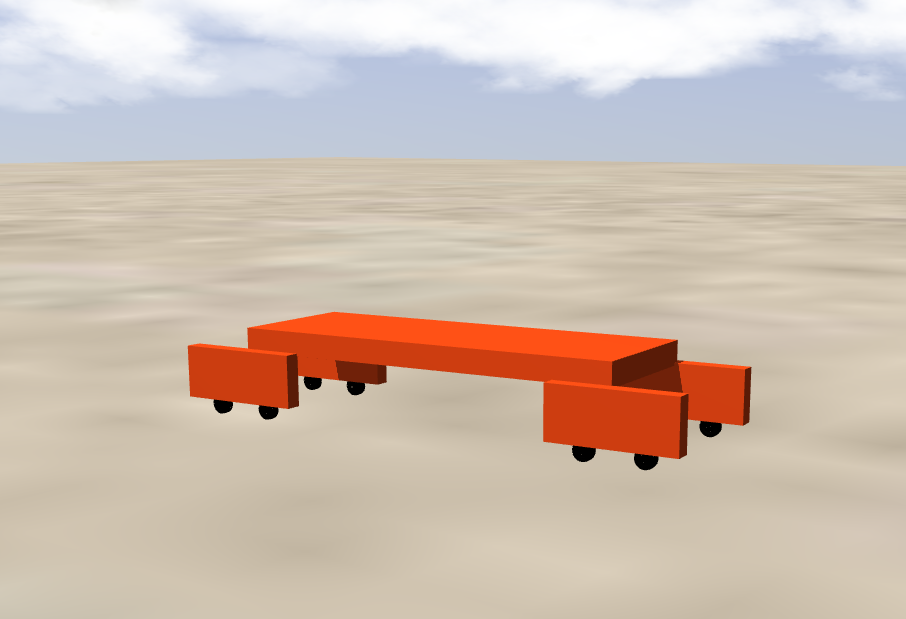
Figure 1: Elevation Map Concept
System Implementation
Our navigation system uses advanced algorithms to process sensor data and create accurate elevation maps. These maps help the robot navigate safely through uneven terrain and avoid obstacles.
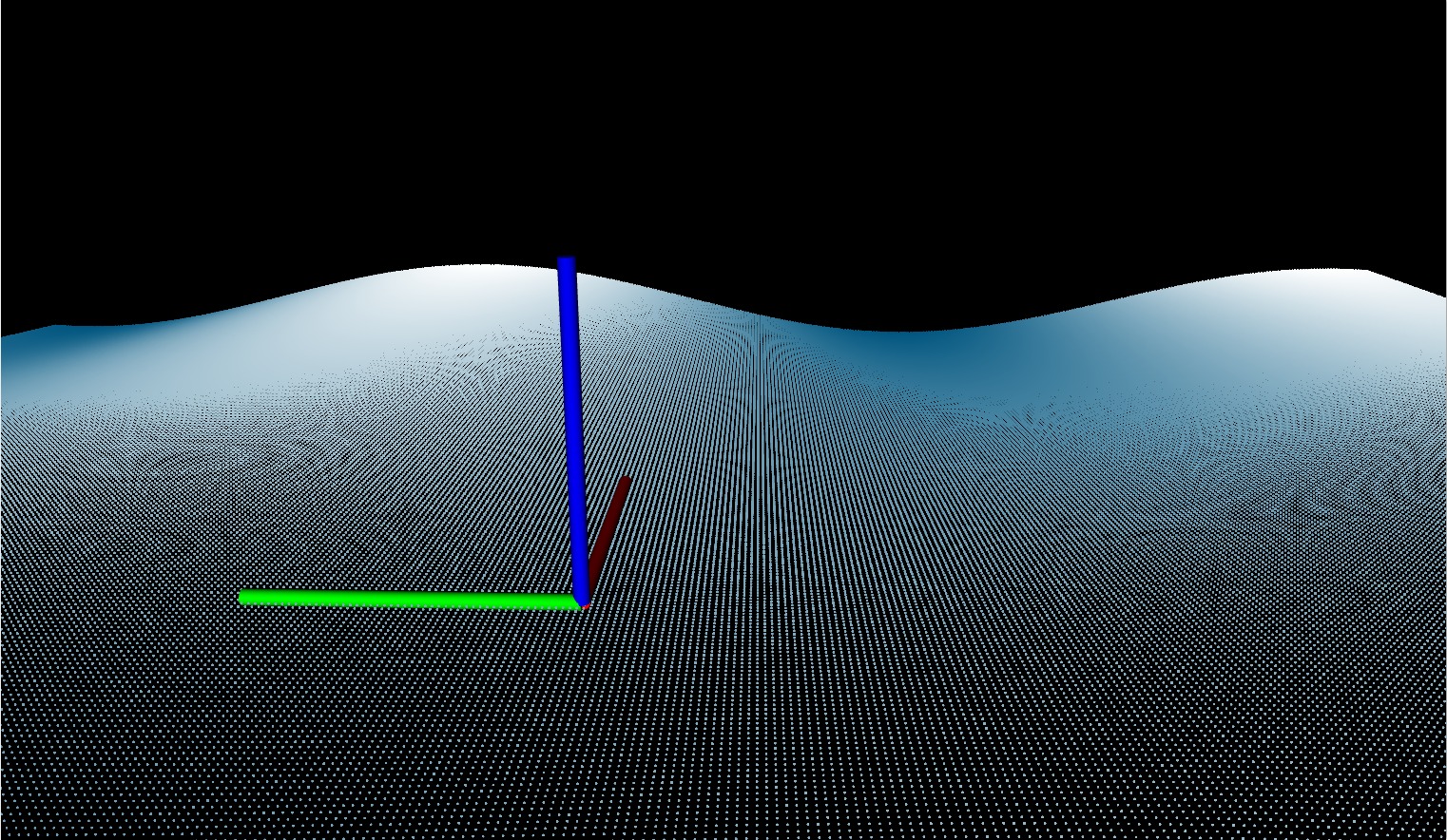
Figure 2: Elevation Map Processing
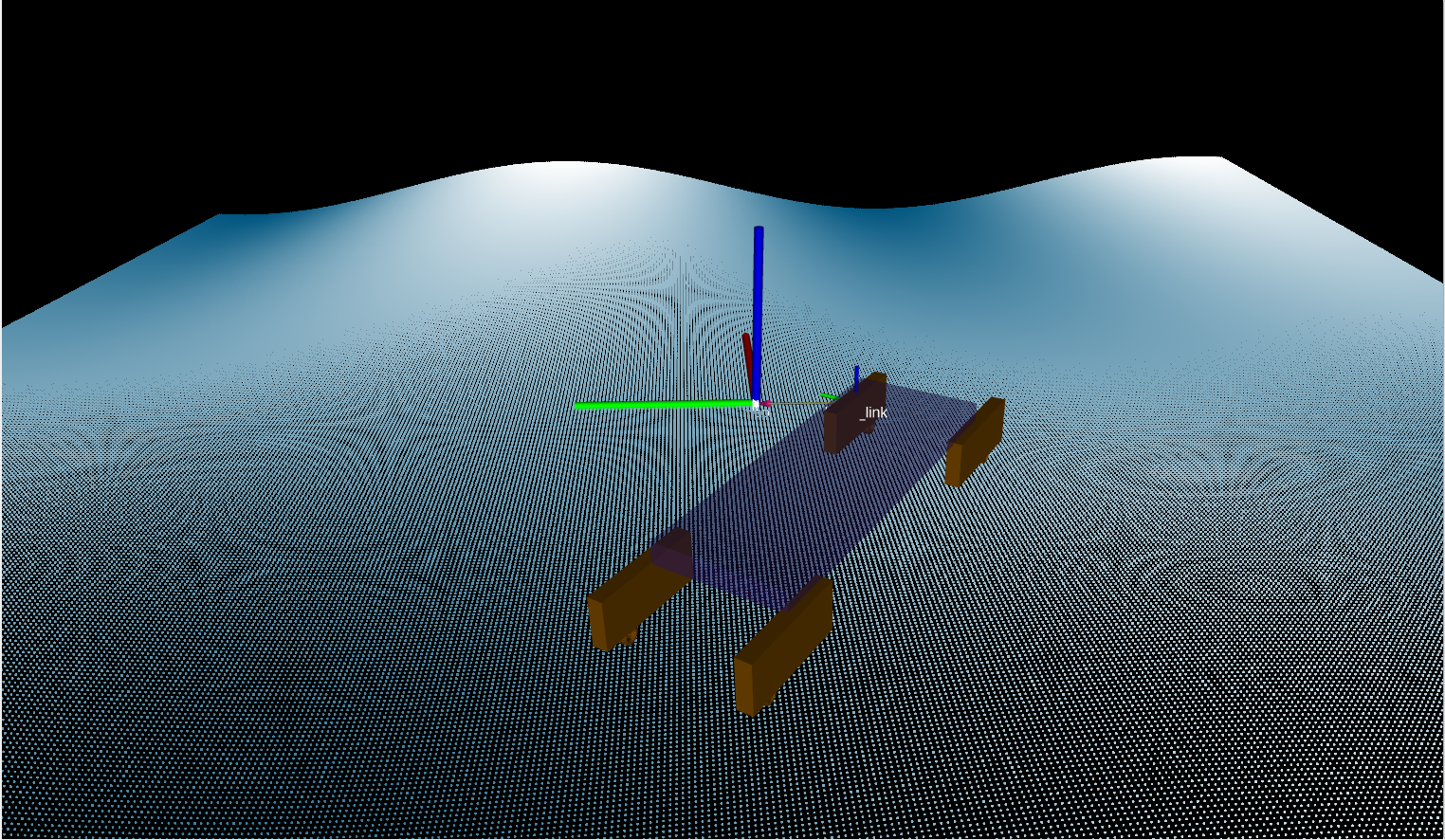
Figure 3: Navigation Planning
Experimental Results
We tested our system in various outdoor environments to validate its performance. The robot successfully navigated through uneven terrain and avoided obstacles.
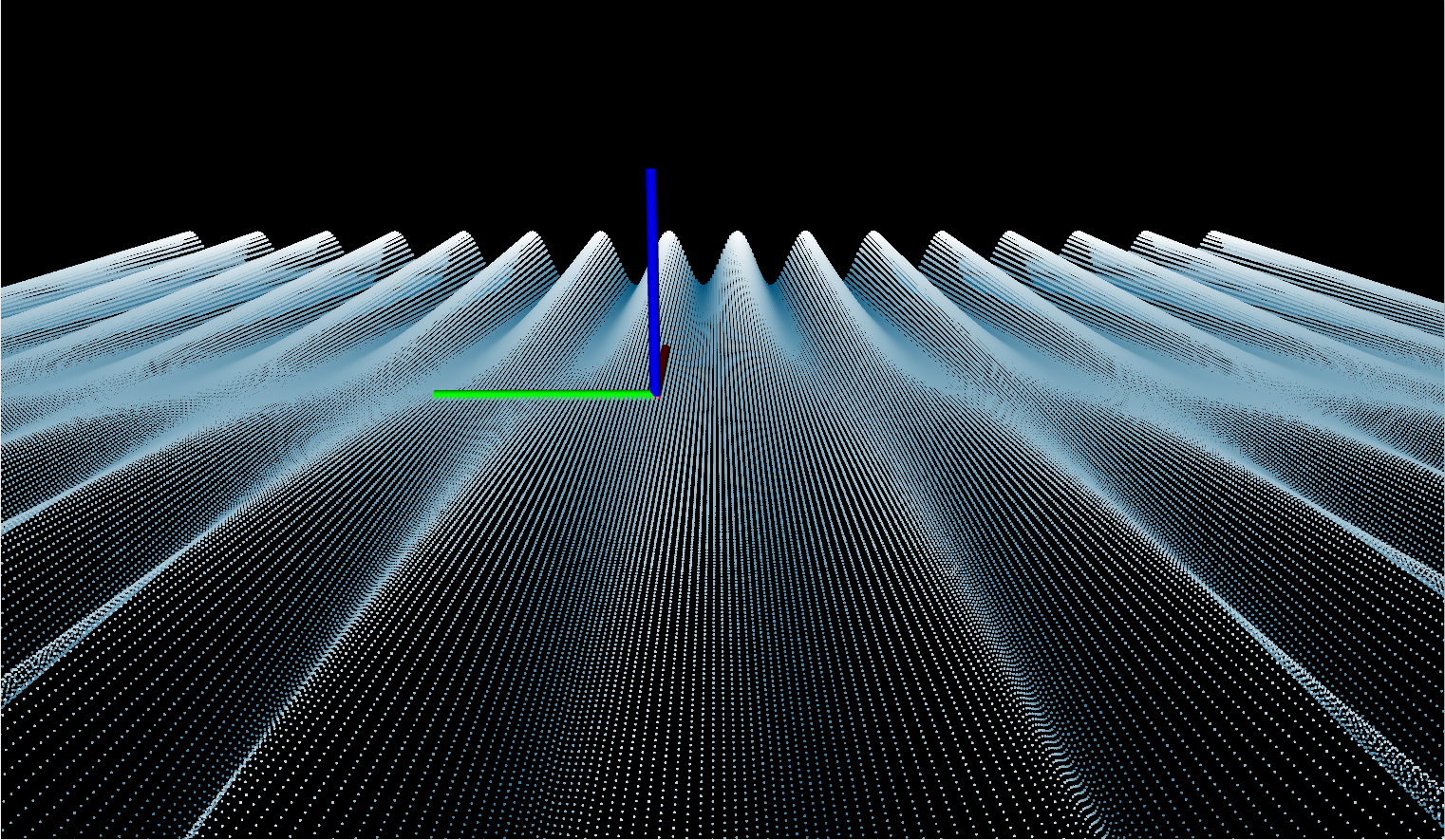
Figure 4: Test Environment
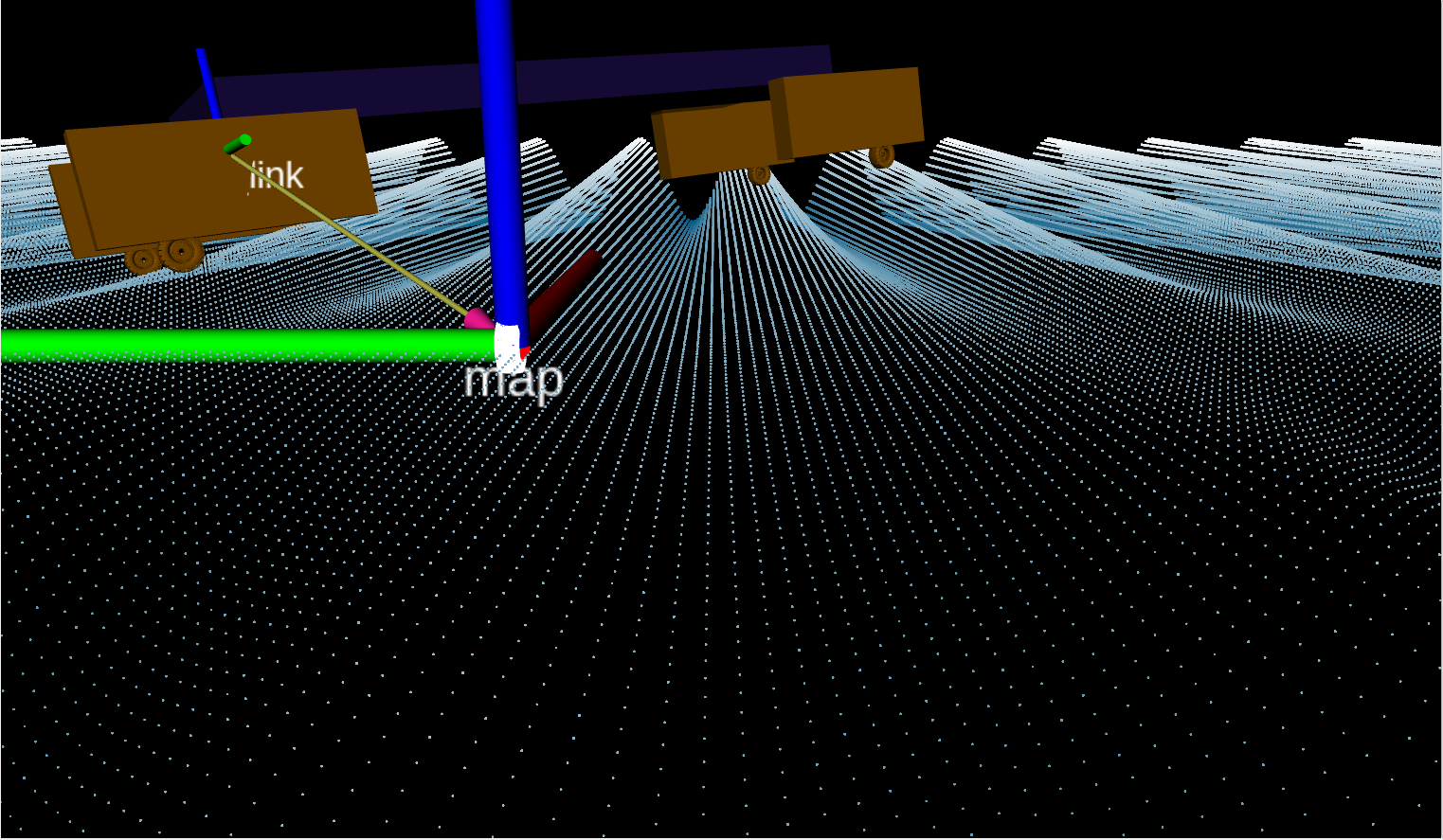
Figure 5: Navigation Results
Conclusion
Our elevation map-based navigation system significantly improves the mobility of large-scale industrial robots in unstructured outdoor environments. The system provides accurate terrain analysis and enables safe navigation through challenging terrains.