3D Scanning with Fetch Robot
Qi Jiang, Xiao Han
Intro
Taking a 3D scan using an RGBD camera from a fixed camera pose often results in a sparse representation on the more distant side of the object's surface. To achieve a high-fidelity scan of the target object, it is typically necessary to acquire multiple RGBD scans from diverse viewpoints. In this project, we have developed and implemented an automated 3D scanning algorithm that is compatible with a wide array of objects. This algorithm has been successfully integrated into a Fetch robot arm.
More specifically, the target 3D region is divided into voxel grids. For each grid, we maintain an optimal scanning distance and track the surface normal. The robot arm is programmed to iteratively identify voxels that have been poorly scanned and to subsequently execute closer scans of these areas. This process is repeated until all voxels have been scanned to our stringent quality standards.
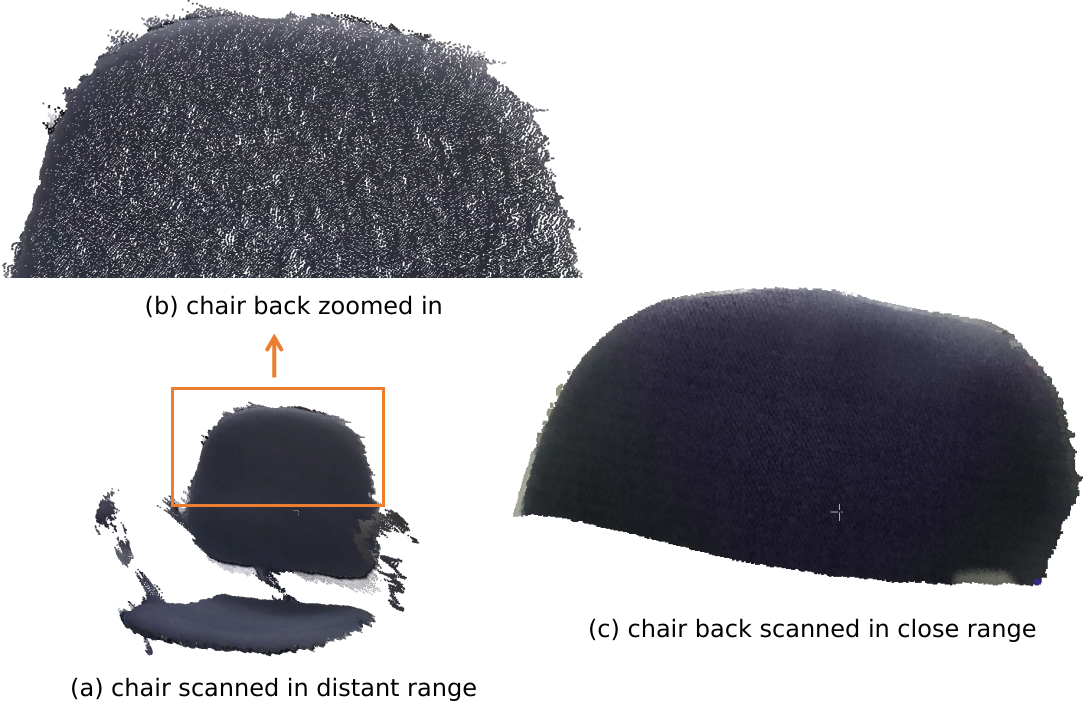
Our methodology enables the automatic production of 3D scans for a variety of objects, resulting in densely populated RGBD point clouds, as illustrated below.
Results