Nonprehensile Object Transportation on a Mobile Manipulator
A Project of the CS289 Mobile Manipulation Course of ShanghaiTech University in 2024
Team Members: Binlin He, Jiawei You, Xinlong Li
About This Project
The goal of this project is to control a manipulator with an mobile base to transport a cup of water, which is a nonprehensile object transportation task, through Model Predictive Control (MPC) and reinforcement learning. Nonprehensile object transportation is a challenging task. In this project, we want to train the manipulator to transport a cup of water using nonprehensile manipulation. We use a MPC method for nonprehensile object transportation with a mobile manipulator, with a focus on transporting a cup of water without spilling it. Also, we used a goal-conditioned reinforcement learning (GC-RL) based method to train the robot arm to learn the kinematic. Our method optimizes the joint-space trajectory online based on task-space objectives and constraints, and uses a fluid dynamics model to prevent water sloshing. We show that our method can handle various scenarios, such as moving to a desired location. Compared to traditional RL method, our RL method can converge faster. Finally, we test our method in simulations and hardware experiments.
Methods
In this project, we want to reappearance an MPC-based approach for balancing objects with a velocity-controlled mobile manipulator and demonstrated its performance in simulated and real experiments in a static scenario. Based on several reference materials, we choose the [9] as our main reference. In real experiments part, we use Kinova JACO2 and control it by using MoveIt ROS package. However, due to the failure of project schedule management, our project did not achieve the expected results. Also, we tried a goal-conditioned reinforcement learning method to learning the kinematic and the waiter problem. The experiment result shown our method can achieve the goal well.
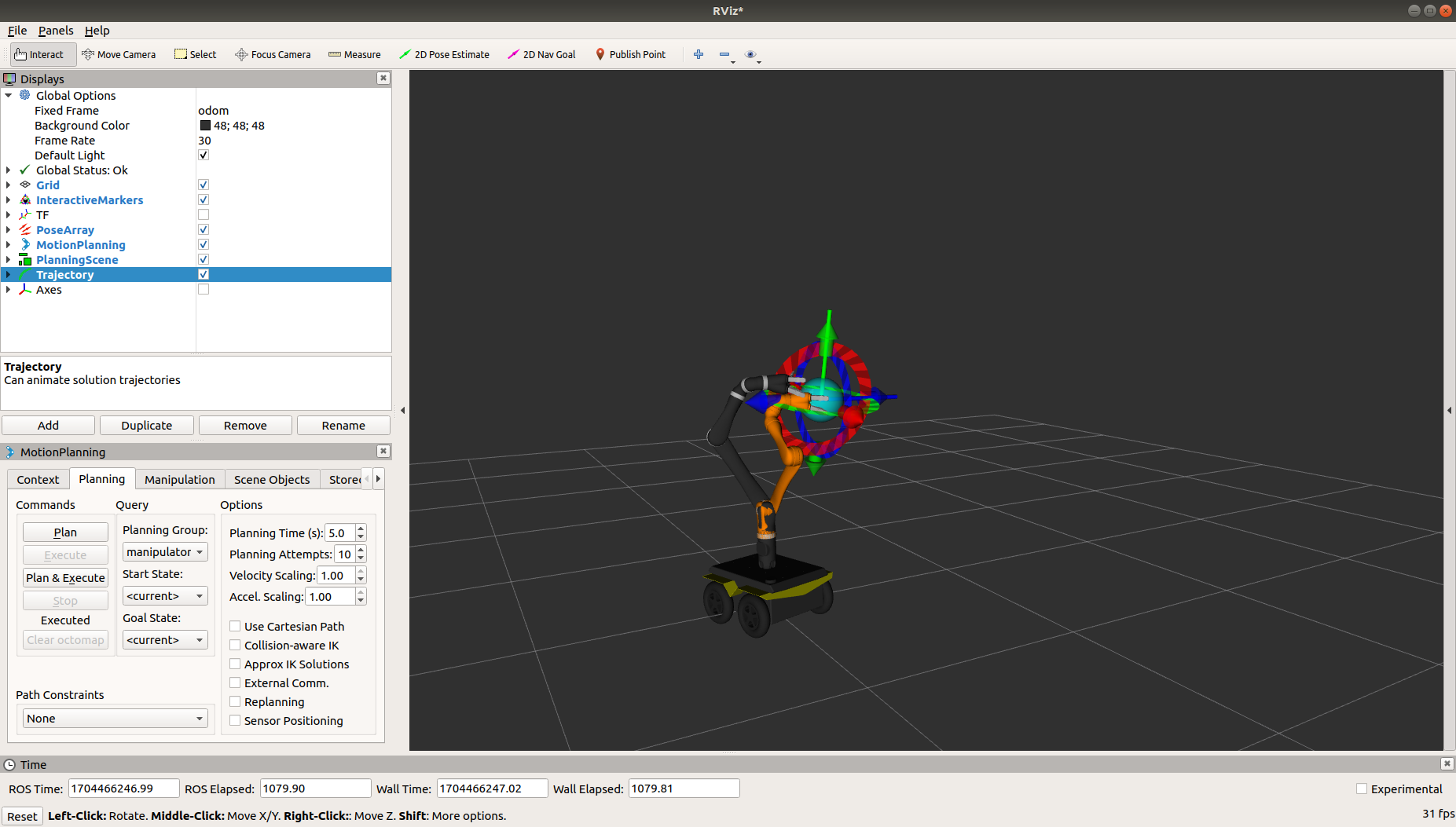
Hardware Description
As shown in Figure, the experimental platform consists of a manipulator with a tray, a mobile base. Specifically, we use Kinova JACO2 as our manipulator and Clearpath Jackal as our mobile base.
Experiments and Results
We have implemented a foundational MPC-based control algorithm and developed a goal-conditioned RL-based simulation. However, further refinement, configuration adjustments, and debugging efforts are still required to optimize their performance.