A project of the Robotics 2023 class of the School of Information Science and Technology (SIST) of ShanghaiTech University. Course Instructor: Prof. Sören Schwertfeger.
Lingying Zhuang, Zhicheng Liu
Introduction
Our team has developed an self-charging system for a car-like robot called Hunter. The purpose of this project is to enable the robot to autonomously locate and connect to a charging station when its battery runs low. This advancement significantly enhances the robot's capabilities, making it more practical and efficient for various applications.
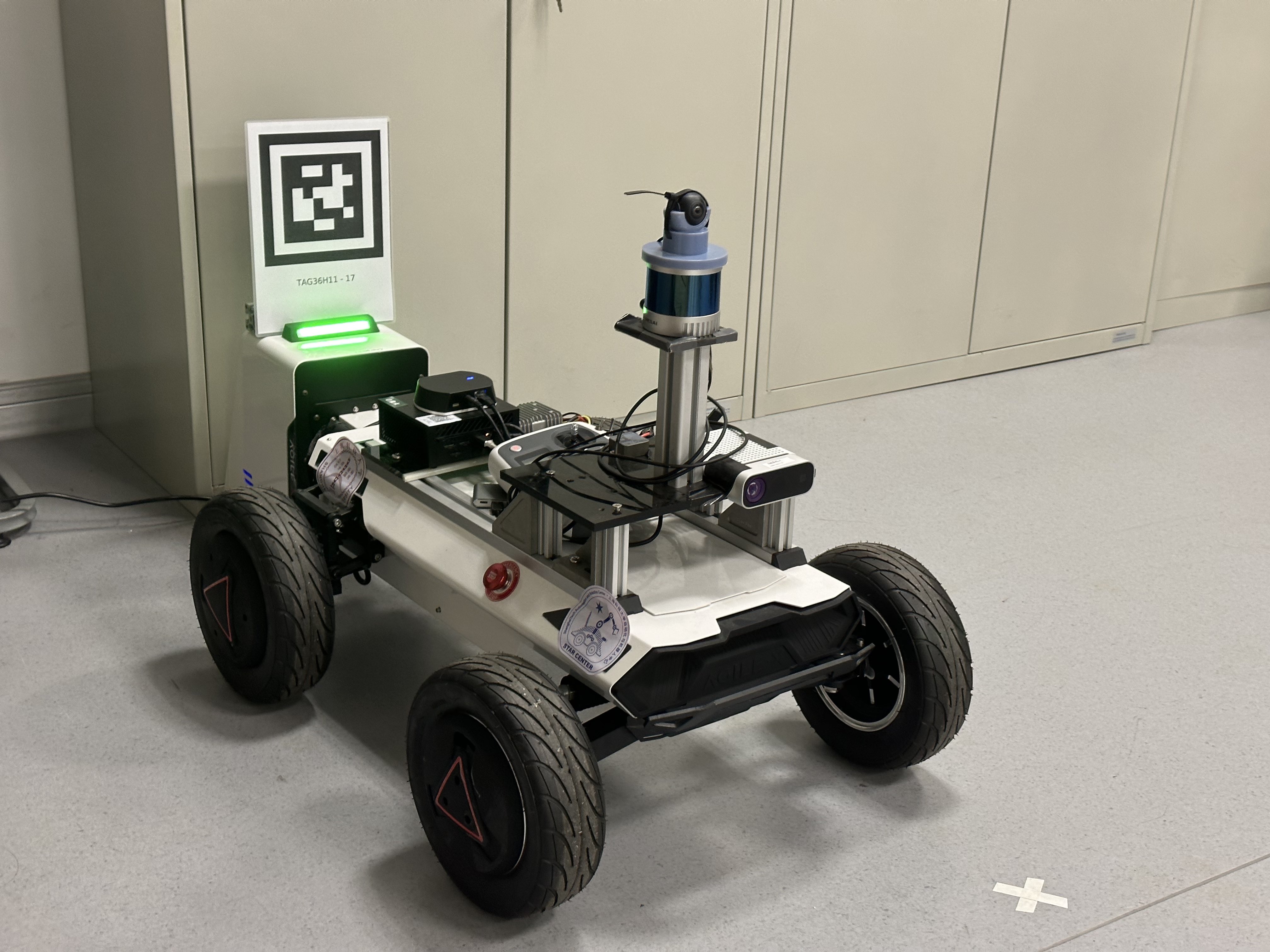
Hunter is equipped with advanced sensors such as a LiDAR and a fisheye camera. These sensors play a crucial role in helping the robot navigate its surroundings and locate the charging station. The charging station itself has a special marker called an AprilTag on top of it, which the robot's camera can detect and recognize.
When Hunter needs to recharge its battery, it uses the camera to search for the AprilTag on the charging station. Once the robot finds the marker, it calculates its position and orientation relative to the charging station. With this information, Hunter can then plan a path to approach the charging station and align itself perfectly for charging.

Throughout the development of the project, we faced several challenges, such as calibrating the fisheye camera, processing the images captured by the camera, and determining the robot's charging status. We successfully overcame these obstacles, resulting in a robust and efficient self-charging system.

In summary, our team has developed a self-charging system for the Hunter robot that enables it to autonomously find and connect to a charging station. This technology has the potential to revolutionize the way robots operate, making them more self-sufficient and suitable for a wide range of applications.
Video