A project of the Robotics 2023 class of the School of Information Science and Technology (SIST) of ShanghaiTech University. Course Instructor: Prof. Sören Schwertfeger.
Gu Jun
Abstract
Introducing OmniWheg-v2, a revolutionary robot designed to conquer staircases with ease based on our work, OmniWheg. Traditional wheeled robots face challenges when navigating stairs, but OmniWheg changes the game. With its unique combination of omnidirectional wheels and a wheg mechanism, OmniWheg effortlessly adapts to staircases, making it the ultimate solution for seamless mobility. Powered by advanced hardware and cutting-edge algorithms, OmniWheg excels in detecting staircases and accurately determining their orientation. By leveraging vision and depth information, the robot's algorithm identifies regions of interest and uses depth data to detect staircases with exceptional precision. Beyond its exceptional stair-climbing capabilities, OmniWheg is versatile and adaptable, making it ideal for a wide range of real-world applications. Experience the future of stair climbing with OmniWheg as it redefines robot mobility, unlocking new possibilities in various domains. Discover the power of OmniWheg, the ultimate stair-climbing robot.
Introduction
Navigation challenges abound for mobile robots and unmanned ground vehicles (UGVs), especially when encountering staircases. Existing methods for stair climbing have explored various approaches, including humanoid robots, quadrupeds, and wheel-leg hybrids. However, reliable stair identification using onboard sensors remains a crucial requirement. Traditional methods rely on RGB image data for edge extraction or 3D point cloud segmentation. While effective, these approaches often struggle with variations in stair images. Machine learning (ML) methods, such as lookup tables, Gaussian Mixture Models (GMM), and Support Vector Machines (SVM), have been employed but don't account for a vital feature—the consistent distance between stair lines. To optimize stair detection, we present a new algorithm that combines vision and depth information. Our algorithm identifies regions of interest (ROIs) and leverages depth data to determine if a region represents a staircase and calculate its orientation. The unique feature of consistent stair line distances further enhances our approach. Our algorithm will be evaluated on our robotic platform, OmniW. By capitalizing on the power of ML and leveraging vision and depth information, OmniW excels at accurately detecting staircases. With our solution, mobile robots and UGVs can navigate staircases with confidence, opening doors to new possibilities in various domains. Experience the future of stair detection with OmniW and witness a paradigm shift in mobile robot navigation.
System Description
Our goal is to enable our wheel-leg robot to navigate real stairs effectively. To achieve this, we are developing an efficient staircase detection algorithm and a robust hardware structure. By leveraging depth information and exploiting the consistent distance between stairs, we aim to create a novel approach. Through extensive research, we will ensure that our proposed method is unique and has not been previously explored. Additionally, we will thoroughly test the climbing ability of our robot and address any potential issues, such as battery capacity limitations.
This project is driven by the need for innovation and aims to successfully implement and validate our staircase detection method on our robot. With dimensions of 720mm in length, 620mm in width, and 390mm in height (190mm without the camera), our robot provides the ideal platform for this groundbreaking endeavor. Join us on this exciting journey as we revolutionize stair detection for wheel-leg robots, unlocking new possibilities in navigation and robotic exploration.
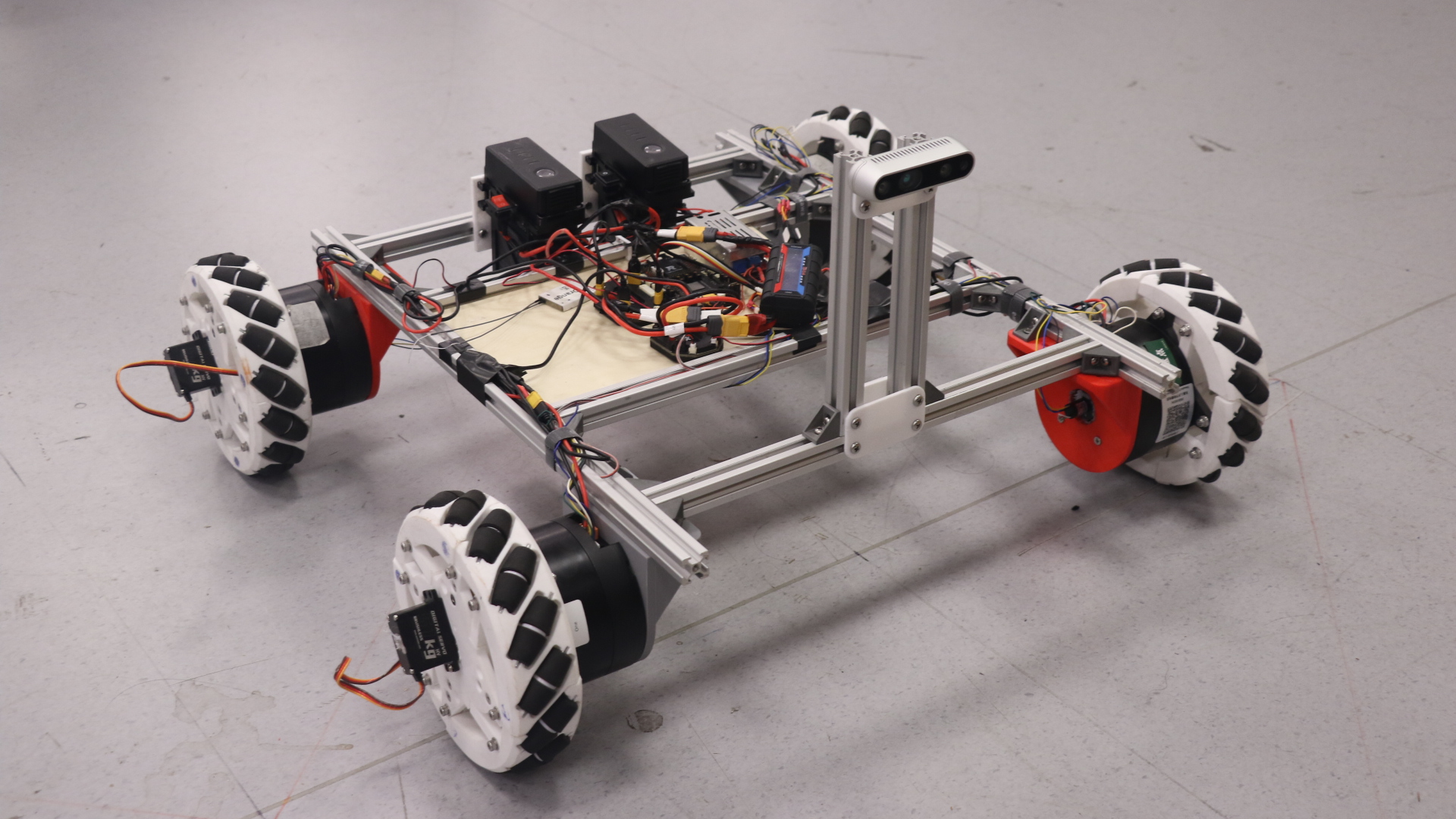
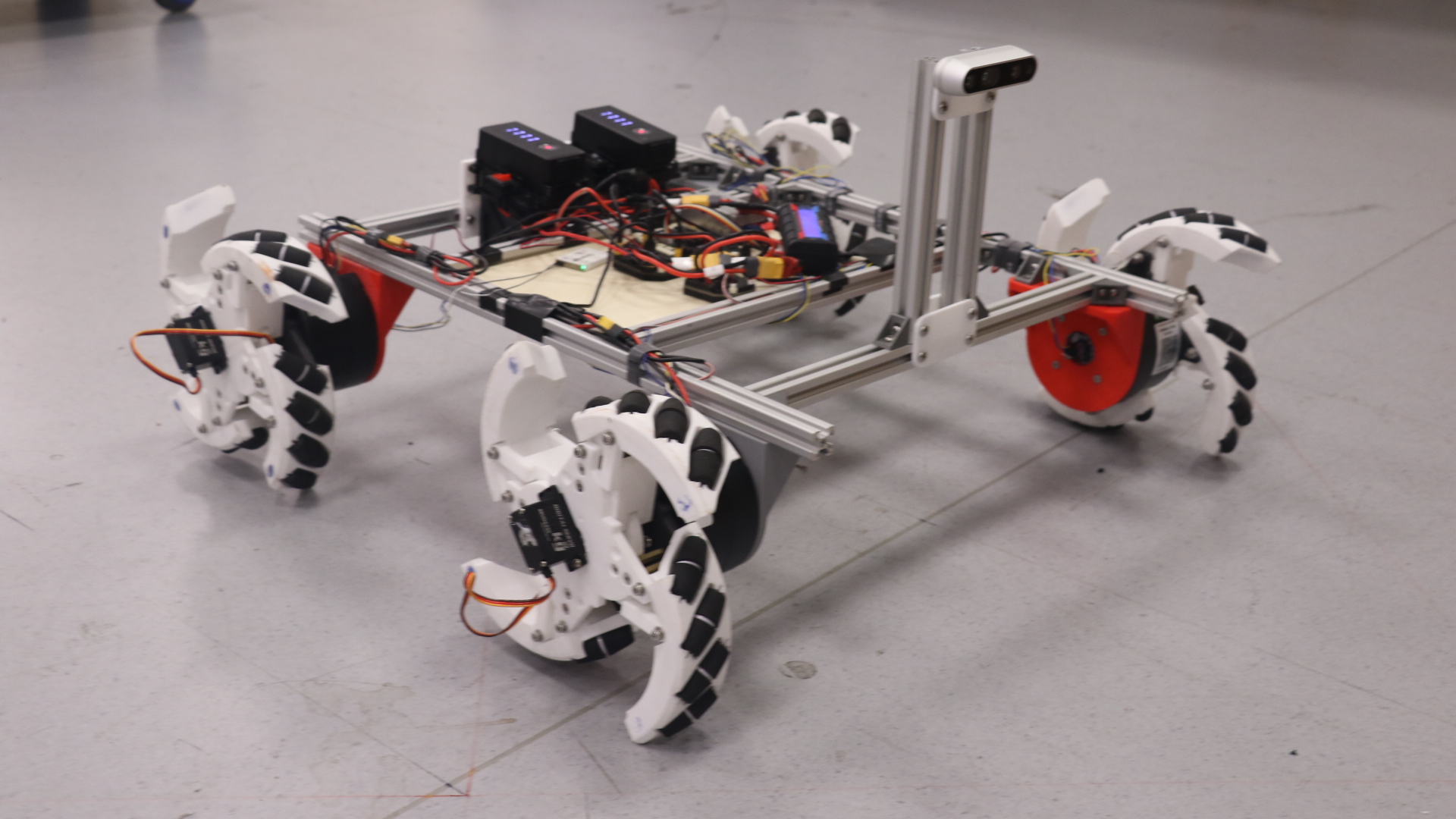
Figure 1. The robot with closed wheels & Figure 2. The robot with opening wheels
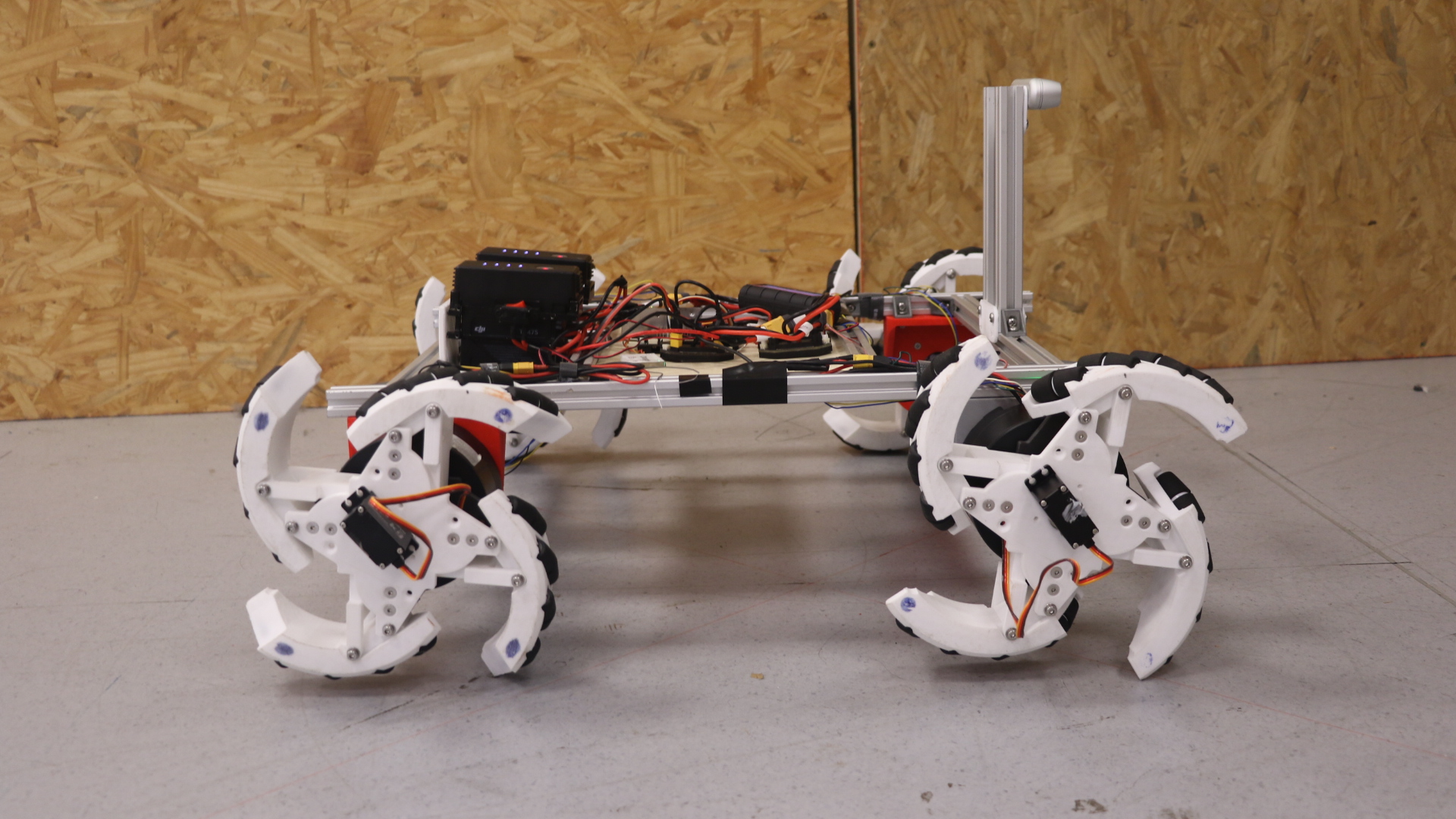
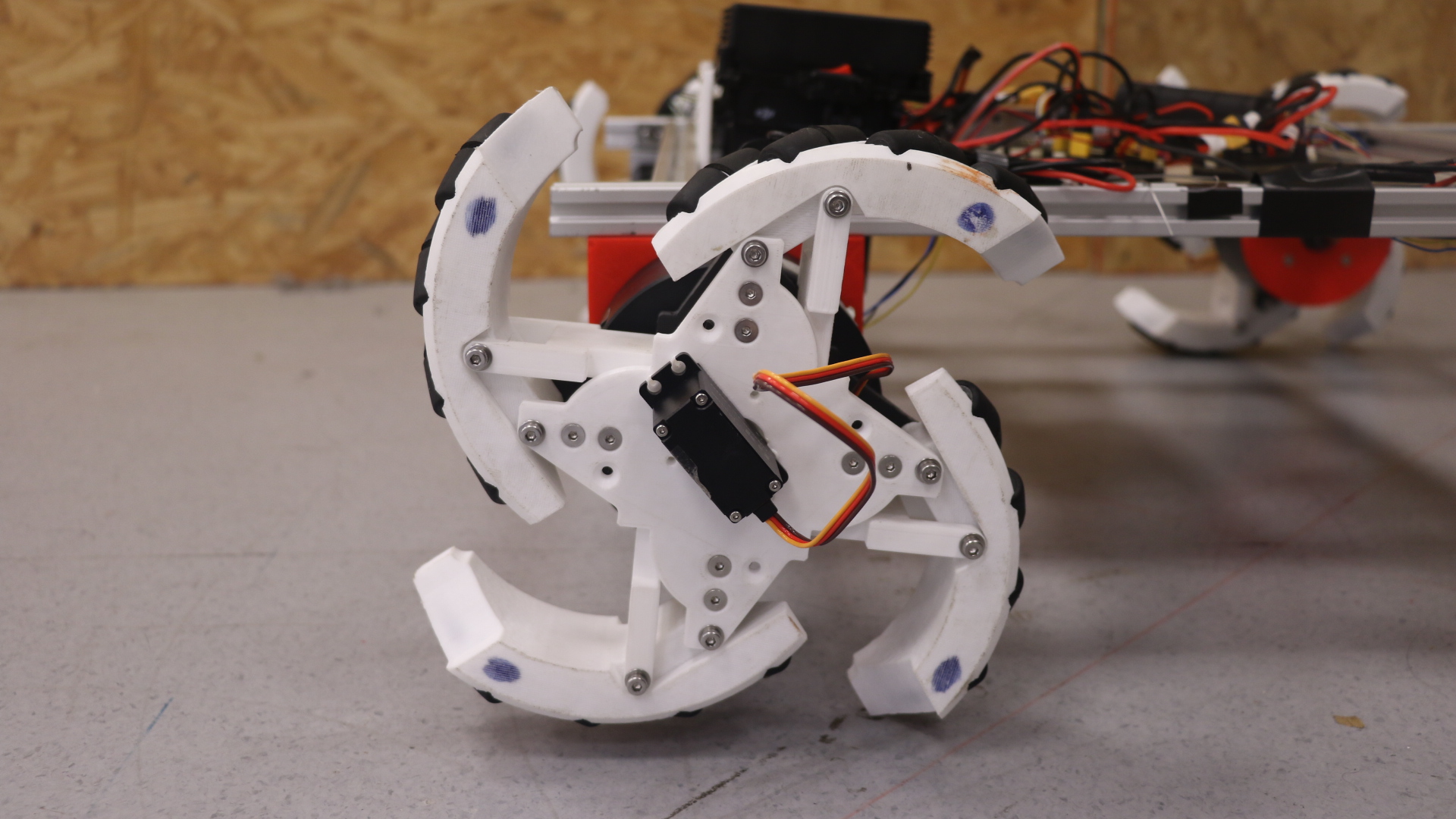
Figure 3. Left view of the robot & Figure 4. More details for a wheel
Experiment
The first goal for the robot is to climb the stairs near the lab. The stairs’
length is 1400 mm, width is 280mm, and the number of stairs is 16 on every
floor. In the experiments, the robot successfully climbed the stairs.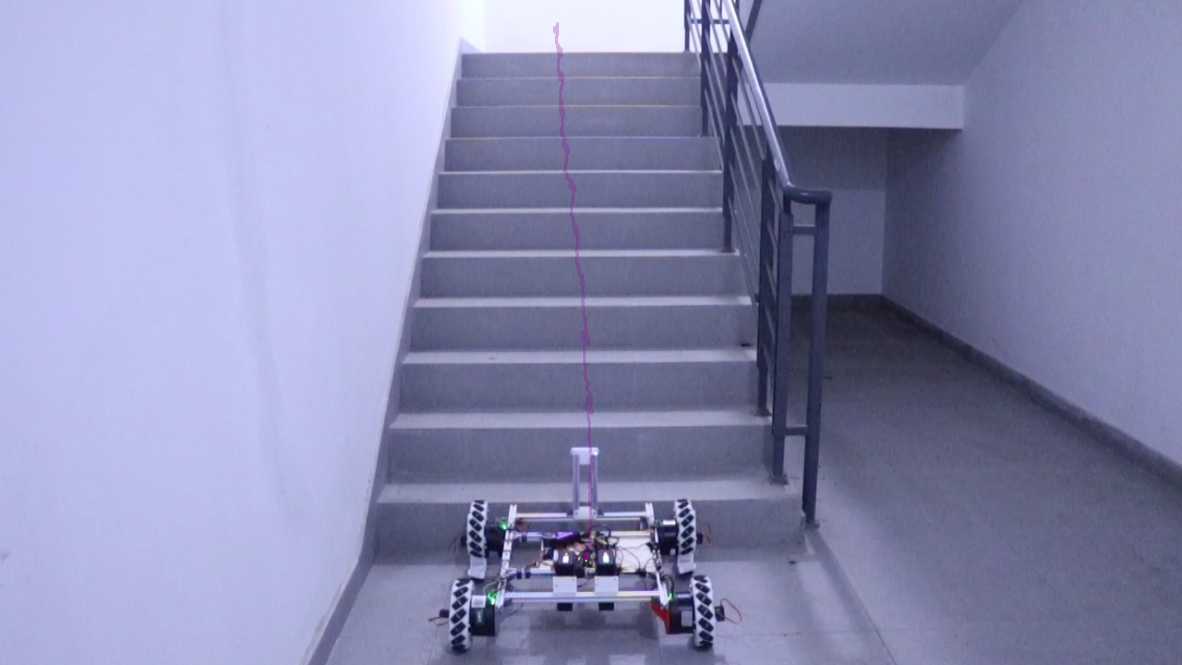

Figure 5. The stairs before climbing Figure 6. The robot climbed the stairs
Conclusion
Our project aimed to tackle the challenges faced by wheel-based robots when navigating stairs, both indoors and outdoors. To overcome these obstacles, we developed an innovative robot called OmniWheg-v2, an upgraded version of our previous OmniWheg design. By integrating omnidirectional wheels and a wheg mechanism, along with advanced hardware components and cutting-edge algorithms for vision and depth information, we significantly enhanced the robot's ability to detect and traverse staircases. Through a series of successful experiments, our robot demonstrated its impressive capability to climb stairs with precision and overcome this complex task. Equipped with an RGB-D camera, the OmniWheg-v2 robot not only accurately detects stairs but also ensures safe navigation by avoiding obstacles, including people, during the climbing process. The development of OmniWheg-v2 and its demonstrated stair-climbing prowess contribute to the advancement of mobile robotics in real-world applications. Future improvements can focus on optimizing the hardware structure to address potential battery limitations and enhance overall system performance and efficiency. The successful implementation and evaluation of the OmniWheg-v2 robot highlight its potential for deployment in various scenarios, including search and rescue missions, home assistance robotics, and industrial automation, where navigating stairs plays a critical role. Join us on this remarkable journey as we redefine stair-climbing capabilities, paving the way for a new era of mobile robotics.
Video