Those are the datasets regarding this publication:
Sören Schwertfeger and Andreas Birk, “Using Fiducials in 3D Map Evaluation” in IEEE International Symposium on Safety, Security, Rescue Robotics (SSRR). IEEE Press, 2015.
Video:
There are two datasets:
- The ground truth 3D and 2D maps generated out of 4 FARO scans (see Figure 1)
Dataset: RoboCup2013_Faro_Maps.zip (235 MB) - 3D and 2D maps created by the robot of team Hector Darmstadt (see Figure 2)
Dataset: RoboCup2013_Hector_Maps.zip (8 MB)
If you are using the ground truth maps please cite the above paper. If you are using the Hector maps please (additionally) cite this paper:
S. Kohlbrecher, J. Meyer, O. von Stryk, and U. Klingauf, “A flexible and scalable slam system with full 3d motion estimation,” in Proc. IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR). IEEE, November 2011.
In order to use the datasets you might want to download cloudcompare http://www.cloudcompare.org/ and maybe octomap http://octomap.github.com .
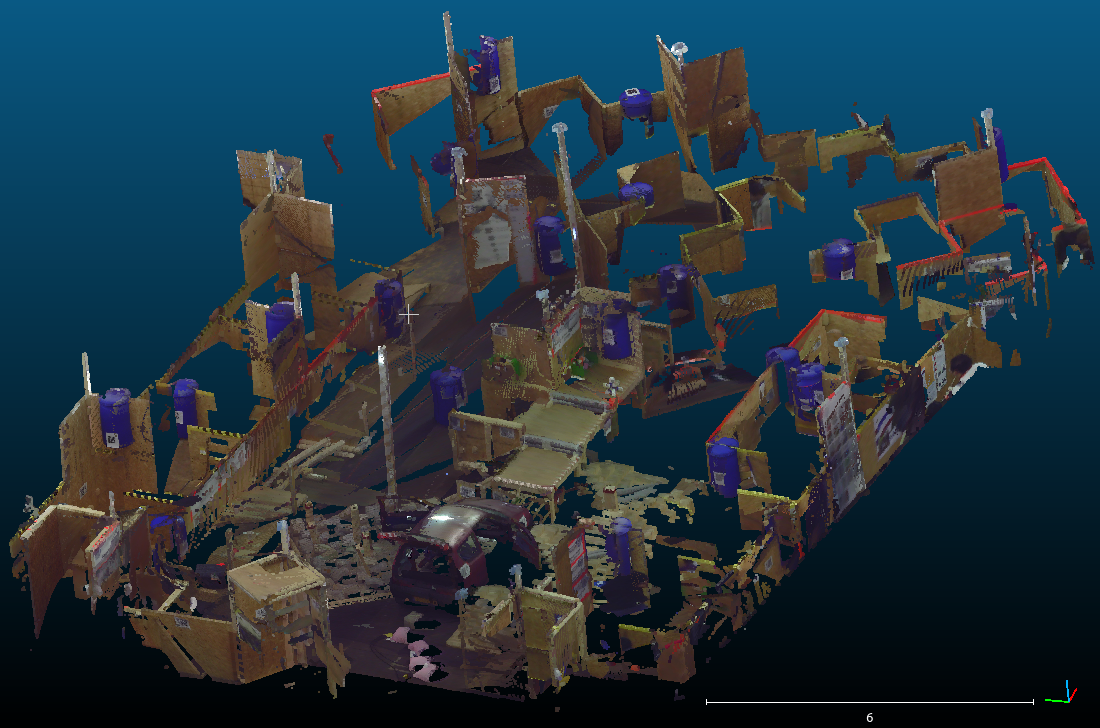
Figure 1: A screen shot of the colored 3D pointcloud of the RoboCup Rescue 2013 arena
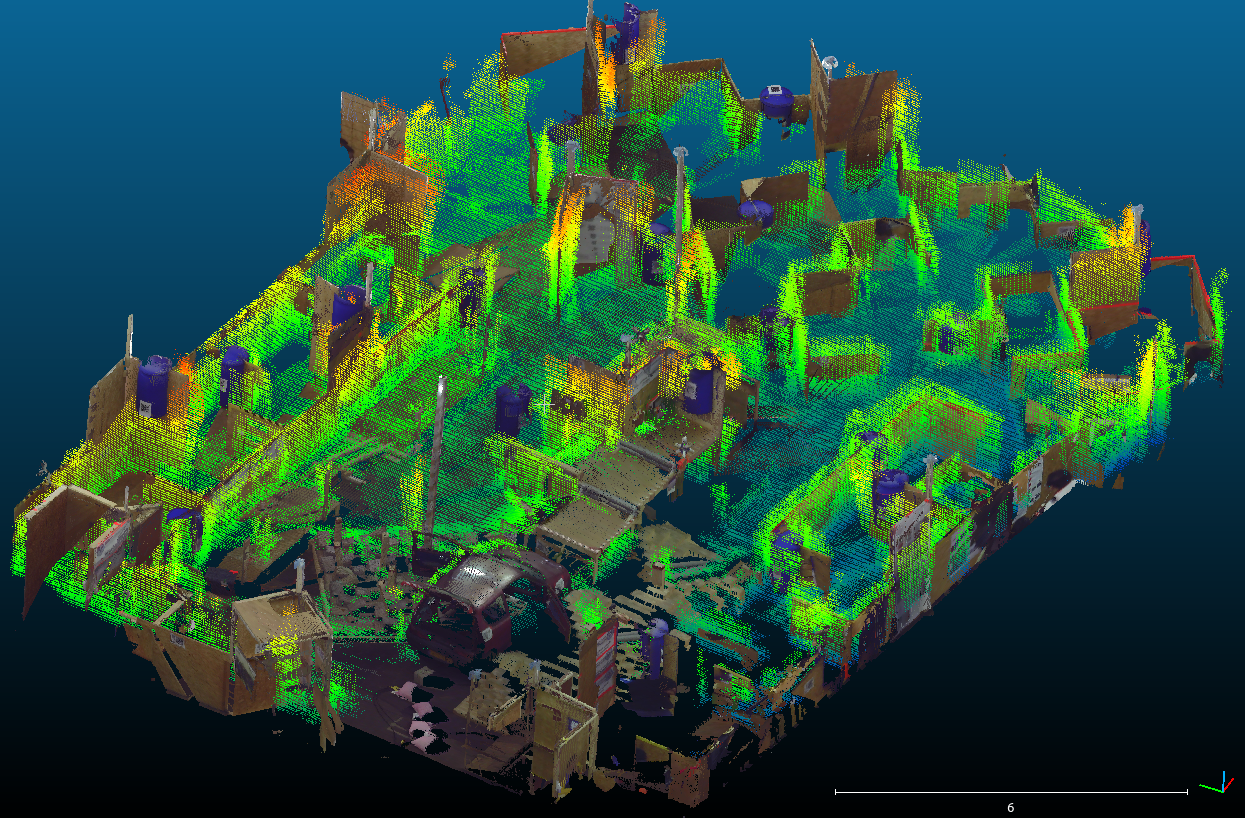
Figure 2: Best in Class mission from team Hector Darmstadt overlaid over the ground truth map.