A project of the Robotics 2016 class of the School of Information Science and Technology (SIST) of ShanghaiTech University. Course Instructor: Prof. Sören Schwertfeger.
Jiawei Hou, Zhiming Li, Yanlin Zha
Project Description
We applied two ROS packages for an autonomous robot, Jackal, driving itself along a sub-optimal trajectory to a given terminal with avoiding obstacles. We tried to formulate the problem via combining simultaneously locating and mapping (SLAM) and mixed-integer optimal control programming (MIOCP) as well as applied move_base package to make local plan. The Jackal identifies obstacles, locates itself via laser sensor. Then, environmental information is passed to move_base as a low-level controller with a given goal to make local plan. These local goals are computed by the high-level optimal controller that regards the jackal as a linear system and obstacles as integer constraints to enforce collision avoidance and sub-optimality.
Currently, we have finished the low-level controller and high-level controller independently. Moreover, we have made a demo to show the low-level controller performs well in avoiding obstacles. It is worth to note that all computation are finished in real-time and this method also allows Jackel to avoid moving obstacles. This project will not terminate at present and we will continue to combing low-level and high-level controller to achieve automatic driving.
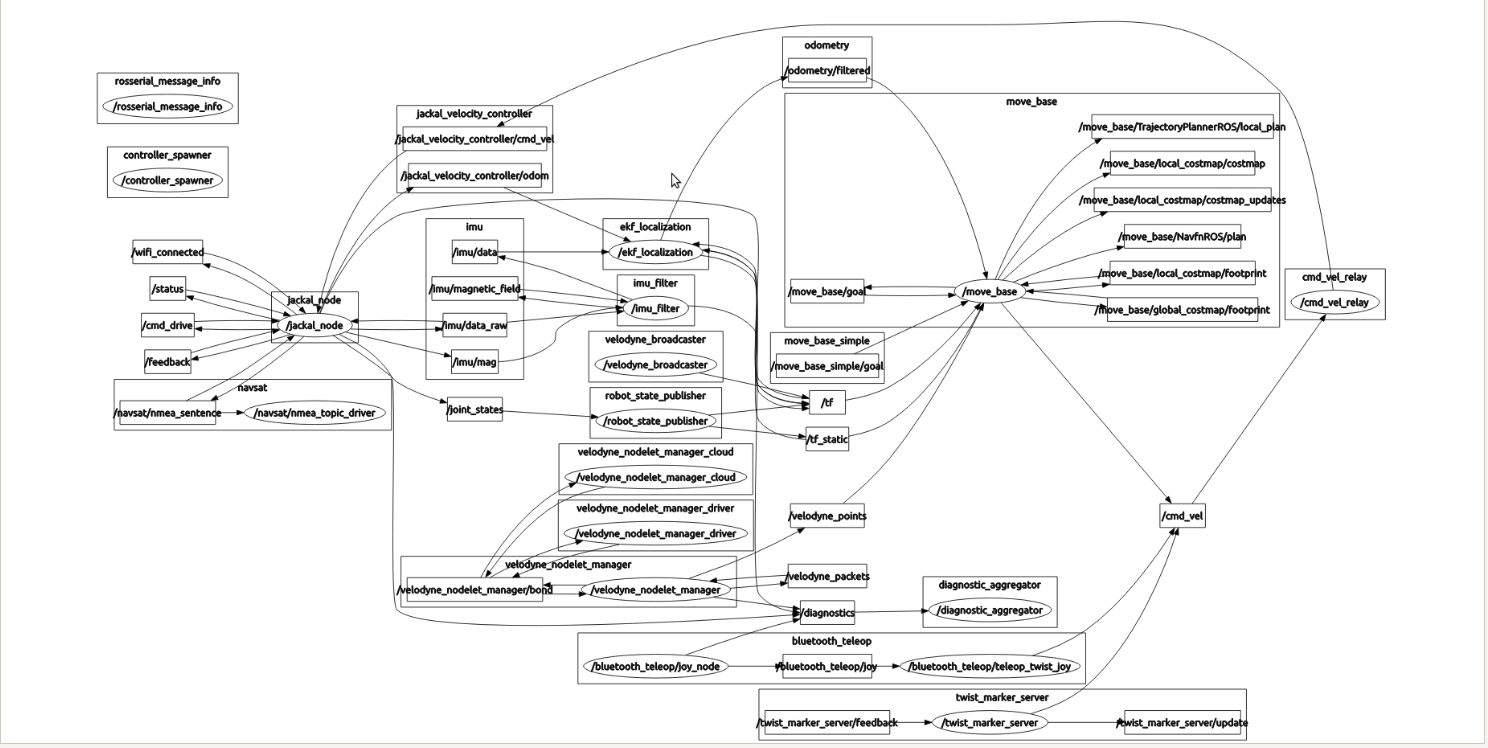
System Structure
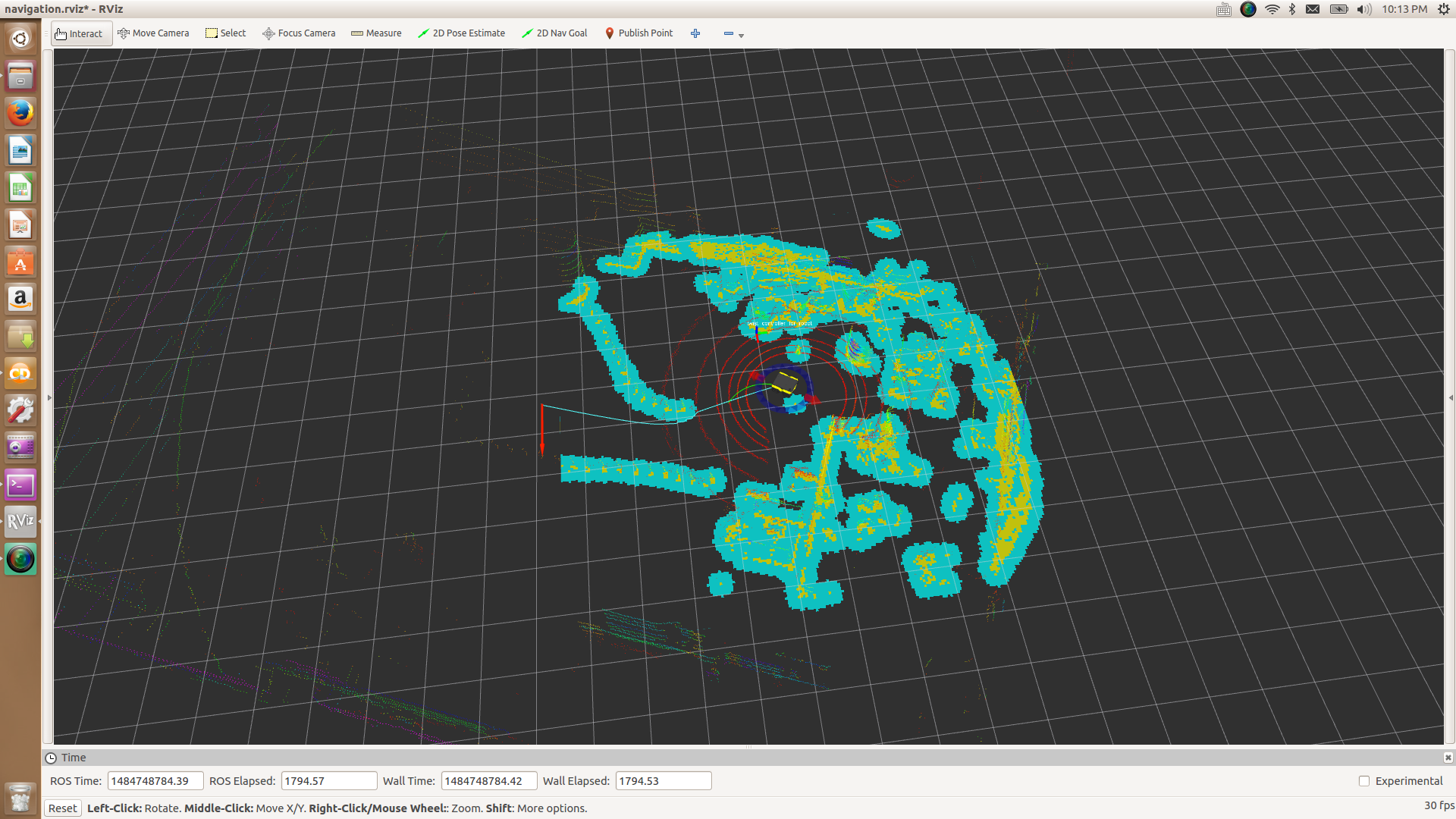
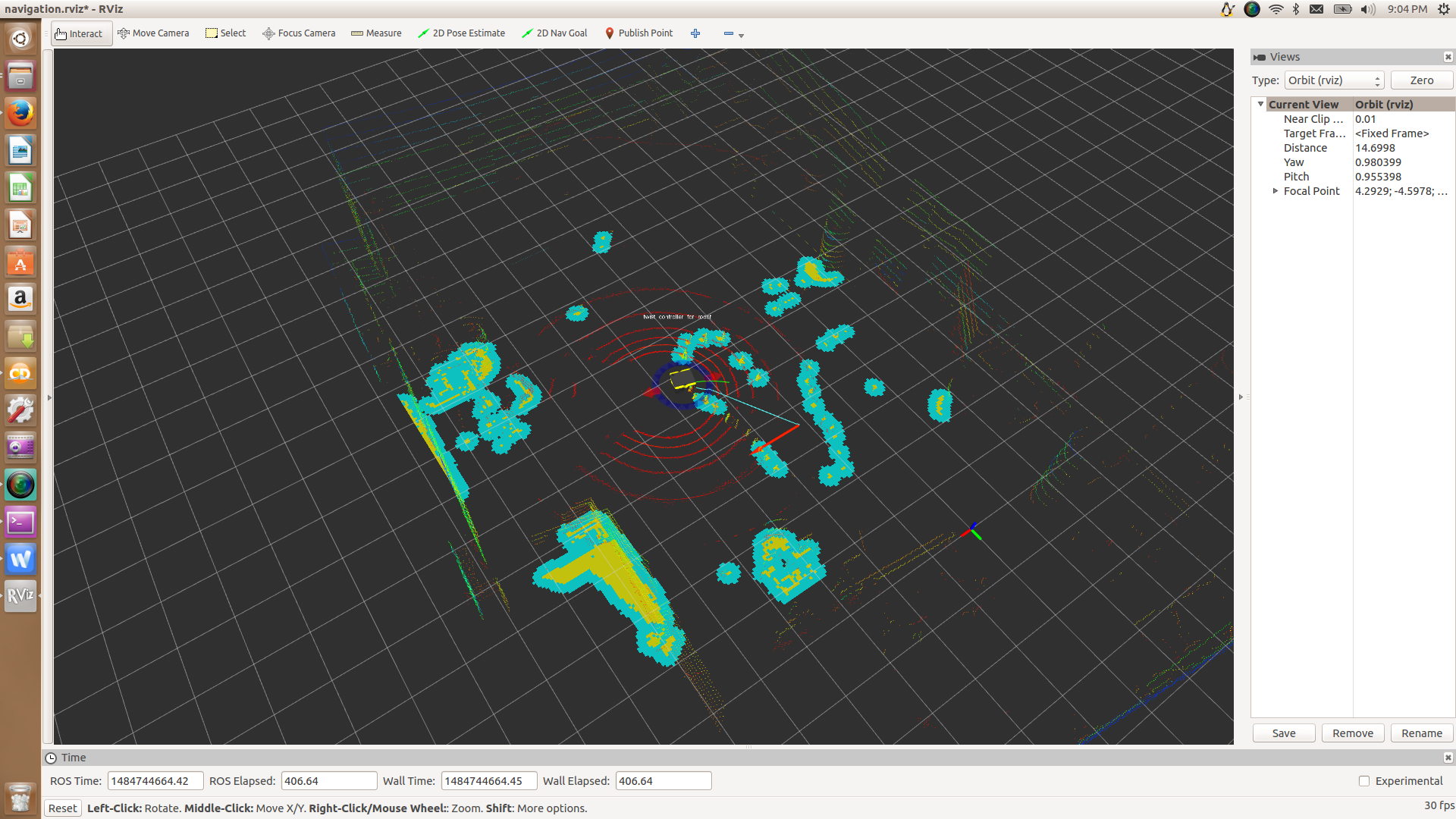
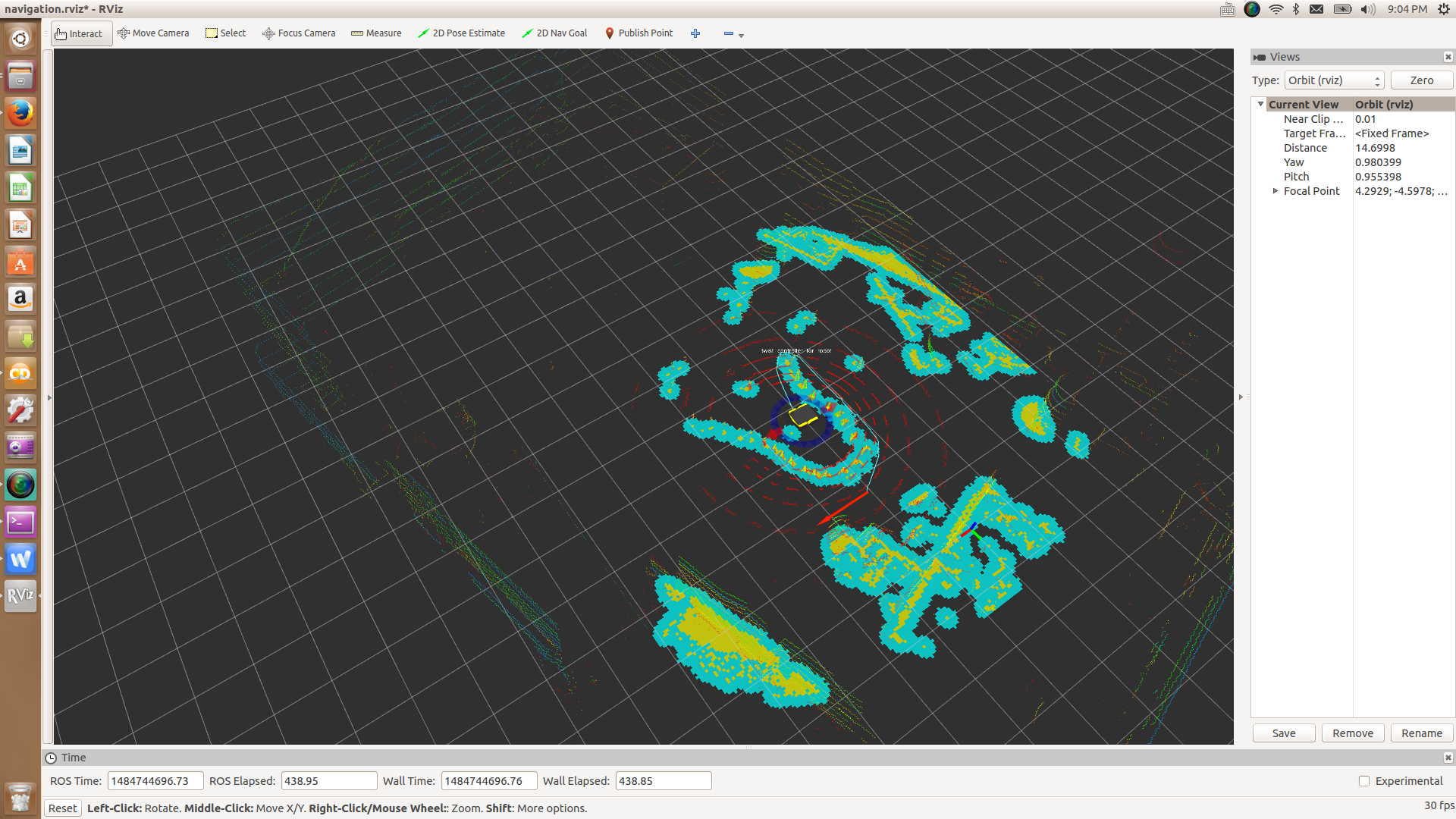
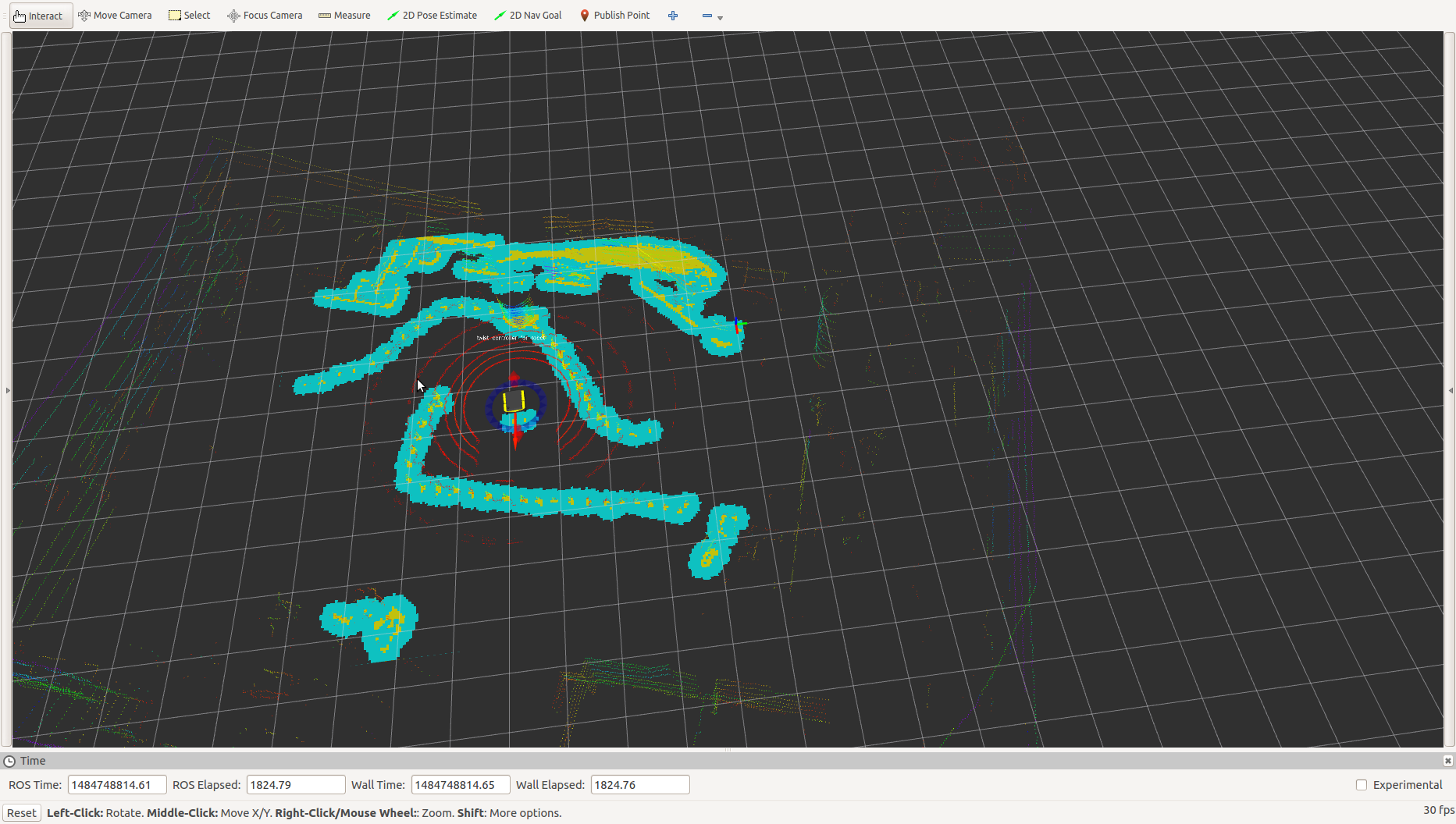
Testing
Jackal with the Velodyne sensor



Path Planning: