Hongyu Chen graduated from China University of Petroleum with a bachelor degree in Electronic Information Engineering. After his graduation, he joined the MARS Lab as a master student.
Education
- 2013.09 - 2017.06: China University of Petroleum(East China)
- 2017.09- Now ShanghaiTech University
Resume
Research Area
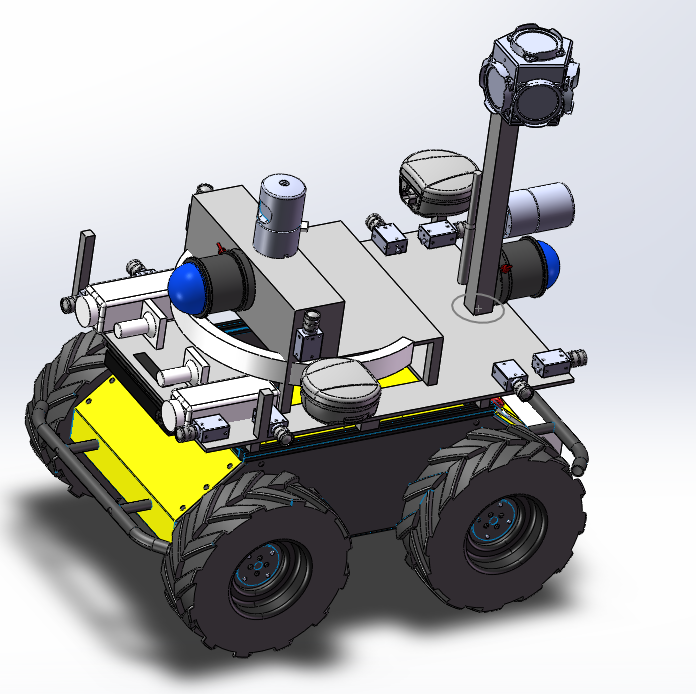
Mapping robot
 Goal: We designed a fully hardware synchronized mapping robot with support for a hardware synchronized external tracking system, for super-precise timing and localization.
Goal: We designed a fully hardware synchronized mapping robot with support for a hardware synchronized external tracking system, for super-precise timing and localization.Publications:
- Towards Generation and Evaluation of Comprehensive Mapping Robot Datasets (IEEE ICRA 2019 WORKSHOP)
- Advanced Mapping Robot and High-Resolution Dataset (submitted to Robotics and Autonomous Systems)
Datasets: Advanced Mapping Robot and High-Resolution Dataset
Multi-sensor calibration via Graph optimization
 We propose a graph-based method to refine the relative poses of the different sensors. We demonstrate our approach using our mapping robot platform, which features twelve sensors that are to be calibrated.
We propose a graph-based method to refine the relative poses of the different sensors. We demonstrate our approach using our mapping robot platform, which features twelve sensors that are to be calibrated.Publications:
Hazmat Sign Detection
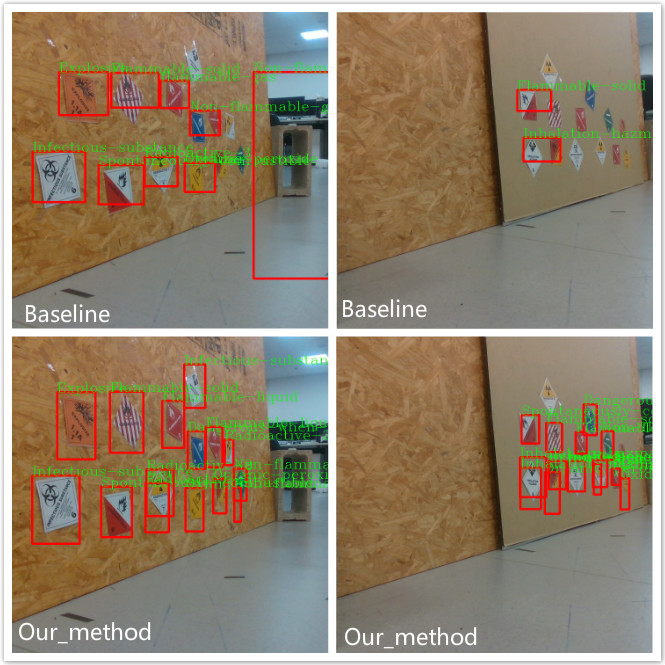 We researched hazmat sign detection algorithms to solve common failures in current methods (e.g. large angle of hzmat sign etc.) to improve technology crucial for rescue robot. We combined geometry information to improve the object detection results of the neural network Yolov3-tiny.
We researched hazmat sign detection algorithms to solve common failures in current methods (e.g. large angle of hzmat sign etc.) to improve technology crucial for rescue robot. We combined geometry information to improve the object detection results of the neural network Yolov3-tiny.Publications:
- CNN Planar Object Detection with Homography Image Rectification (submitted to ICRA 2020)
Datasets: MARS-Hazmat Dataset
Mapping robot II(On Going)