Hou Jiawei is interested in topological map generation and its applications. She is also interested in developing robot arm projects.
Education
- 2016.9 - Now: ShanghaiTech University; Mobile Robotics PhD student
- 2012.9 - 2016.6: Southwest Jiaotong University Engineer Bachelor
Projects
Monocular Visual Odometry on the GPU
In this project I estimated the camera pose transformation between images taken by a single camera at different points in time.
Full Speed Jackal
We applied two ROS packages on a robot, Clearpath Jackal, driving by itself along a sub-optimal trajectory to a given goal point while avoiding obstacles.
Team member: Jiawei Hou, Zhiming Li, Yanlin Zha
Participated in RoboCup Resce China 2017
My main job is building a urdf file for our rescue robot.
The Area Graph -- A map topological representation
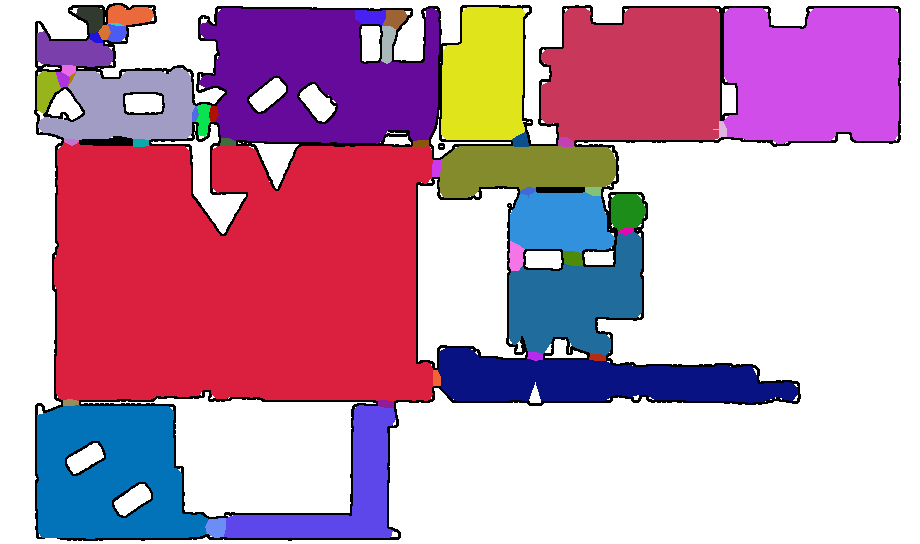 We propose a novel map representation, the Area Graph, which makes the computation of large map much faster and easier. Areas of the Area Graph are generated from the Topology Graph to segment a given 2D map. The areas are connected by passages, which are usually doors and junctions, and contain Voronoi edges as paths through areas.
We propose a novel map representation, the Area Graph, which makes the computation of large map much faster and easier. Areas of the Area Graph are generated from the Topology Graph to segment a given 2D map. The areas are connected by passages, which are usually doors and junctions, and contain Voronoi edges as paths through areas. Application to Path Planning Based on the Area Graph
 Based on the Area Graph, we build the Passage Graph for topological graph path planning in a map. The Passage Graph is built with the passages from the Area Graph as nodes and paths between passages as edges. Given a start and a goal, they are connected to their closest passages and the path between these two passages can be found by some simple search algorithm, e.g. the A* algorithm.
Based on the Area Graph, we build the Passage Graph for topological graph path planning in a map. The Passage Graph is built with the passages from the Area Graph as nodes and paths between passages as edges. Given a start and a goal, they are connected to their closest passages and the path between these two passages can be found by some simple search algorithm, e.g. the A* algorithm.Map Matching
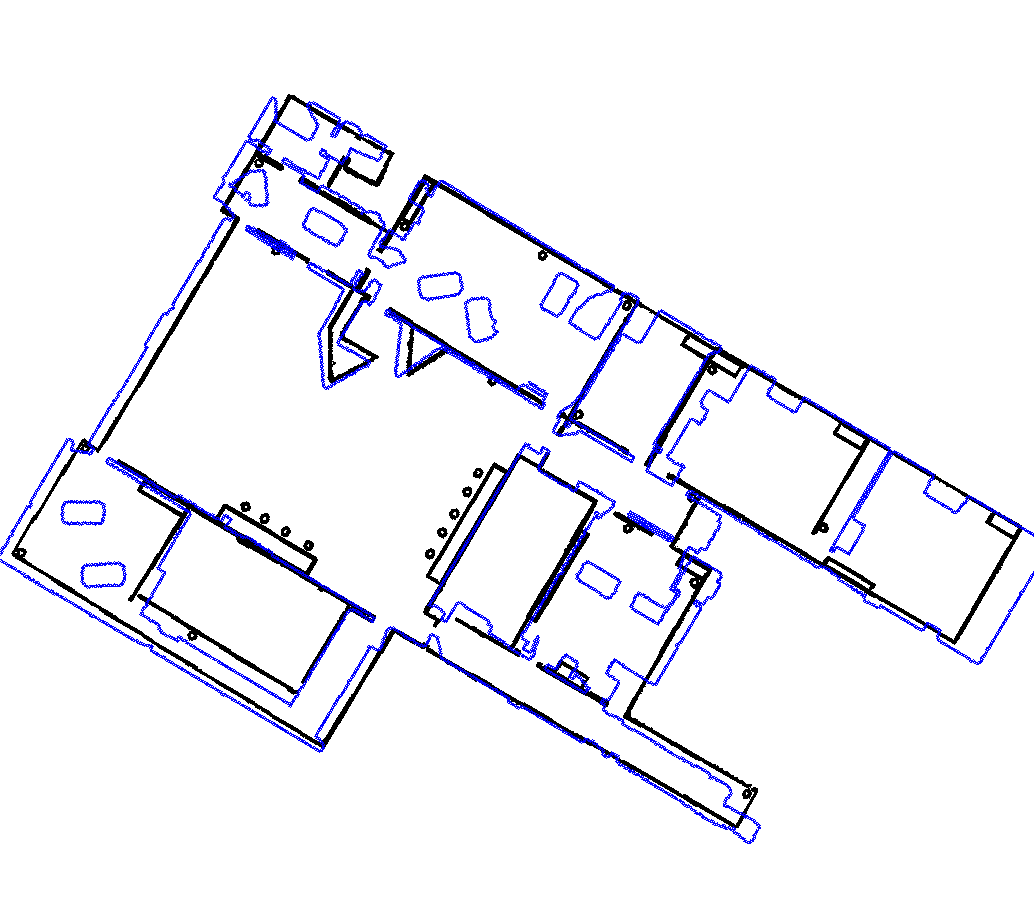
Given 2 maps scanned in different sessions of the same environment with enough overlap, we match them by matching the corresponding areas of their Area Graphs. Then the transformation between 2 maps can be estimated from the correctly matched area pairs.
Mobile Manipulation Tutorial (MoManTu)
The tutorial teaches how to program a mobile robot with a robot arm to do mobile manipulation. The example systems are a Fetch robot and a Clearpath Jackal with a Kinova Jaco attached.
Cotton Harvest
Harvest cotton autonomously with robot arms attached on field mobile robot. The system for demo is a Clearpath Husky with a Schuck robot arm (first version) / an Aubo arm (second version). I am in charge of the system integration (sensors + robot arm + cotton recognition + object 3D position estimation).
Multi-sensor Calibration (IMU + 4 cameras + LiDARs)
We present a general sensor calibration method, named Multical, which supports spatiotemporal calibration of camera-LiDAR-IMU setups, without providing initial guesses for spatial extrinsics. It makes use of multiple planar calibration targets whose poses will be estimated alongside spatiotemporal calibration.
Internship at Tencent Robotics X Lab: Multi-robot system for Autonomous Construction
Publications
- Hou, J., Y. Yuan, and S. Schwertfeger, "Area Graph: Generation of Topological Maps using the Voronoi Diagram", 19th International Conference on Advanced Robotics (ICAR): IEEE Press, 2019.
- Hou, J., H. Kuang, and S. Schwertfeger, "Fast 2D Map Matching Based on Area Graphs", 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO): IEEE, 2019.
- He, Z., J. Hou, and S. Schwertfeger, "Furniture Free Mapping using 3D Lidars", 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO): IEEE, 2019.
- Cai, J., J. Hou, Y. Lu, H. Chen, L. Kneip, and S. Schwertfeger, "Improving CNN-based Planar Object Detection with Geometric Prior Knowledge", IEEE International Symposium on Safety, Security, Rescue Robotics (SSRR): IEEE Press, 2020.
- He, Z., H. Sun, J. Hou, Y. Ha, and S. Schwertfeger, "Hierarchical Topometric Representation of 3D Robotic Maps", Autonomous Robots, 2021.
- Hou, J., Y. Yuan, Z. He, and S. Schwertfeger, "Matching Maps based on the Area Graph", Intelligent Service Robotics, 2022.
- Xiangyang Zhi, Jiawei Hou, Yiren Lu, Laurent Kneip and Soren Schwertfeger, "Multical: Spatiotemporal Calibration for Multiple IMUs, Cameras and LiDARs", IEEE. IROS, 2022.